Hello Jay,
to your questions:
1. Stepper
The 2040 is the number of steps the stepper needs to complete one revolution. This is almost a fixed value.
The 3600 is basically an auxiliary value. A full circle has 360 degrees. Now it may be that the Simulatorwerte are so small, which in turn then jerky in the evaluation of the stepper itself. It is appropriate here to set this value higher, e.g. by a factor of 10, to get a smoother run. The key here is to keep the reference to the 360 degrees. If you like it more complicated, you can use any value, but then have to worry about getting to the correct positions.
In this sense, it is not necessary to change anything in the values for a linear operation.
The test value is basically also an arbitrary value. In my tutorial I took the end stop here with full flaps. This is 273 degrees back, therefore 2730 (factor 10). With the flaps you only need about 270 degrees of the full circle.
If you use the stepper for example As an altimeter, you can take any value between 0 and 3600 here. At 1800, a semicircle of 180 degrees should be approached here.
If the area that is traversed is no longer linear (as with the flaps), you have the option to specify this via the interpolation table. Here the simulator values Sim1, Sim2 .... Sim
n are assigned the stepper values Out1, Out2 ... Out
n. If a simulator value of the table is reached, the stepper is set to the corresponding initial value. See stepper tutorial:
https://www.mobiflight.com/forum/message/5649.html
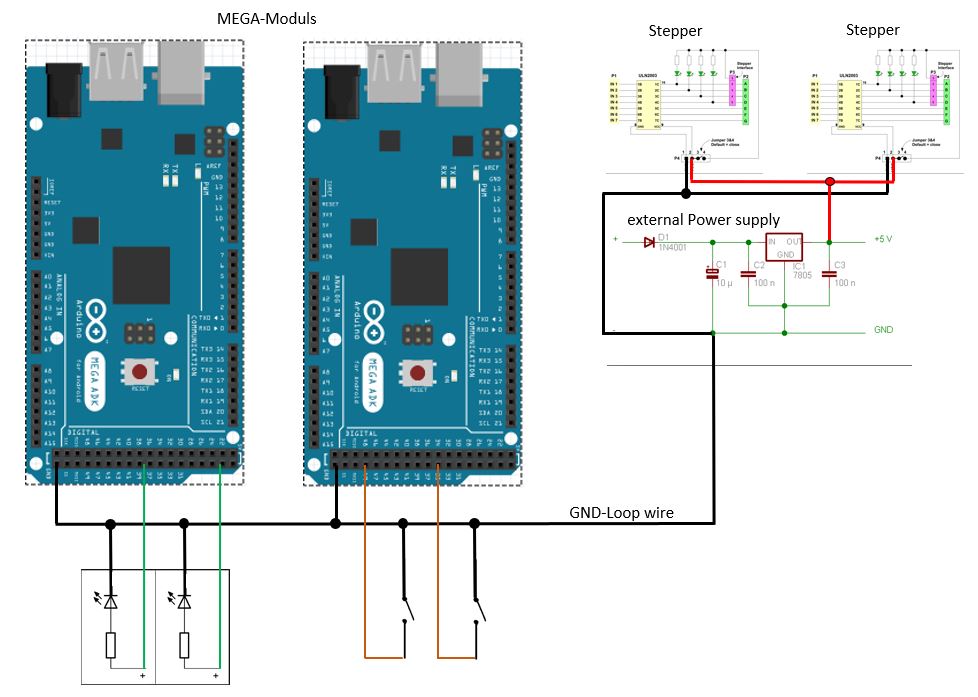
2. External power supply
If, as mentioned by way of example, you connect 10 steppers to a board, then you will not be able to connect this external 5V to the DC socket of the MEGA, because the current would then flow over the MEGA board, thus dying the heat dead.
It is extremely important here to connect the external power supply(s) as follows:
GND of the power supply to GND of the MEGA module, +5V to the stepper directly.
By connecting the two GND potentials, they are considered as an electrical plane. This is necessary so that the data coming from the MEGA have the same reference potential (GND) so that the stepper can be controlled.
If the GND connection is missing, the stepper can not do anything with the data, as there is no counter potential.
It's like starting the car. If you connect only da +12V cable, you can not jump-start, only when the GND potential of the other car is connected, it works. So you always need a self-contained circuit, otherwise no electricity flows.
Nothing else has it with the external power supply on it. GND closes the circuits together.
Since cockpit construction may occasionally require the use of external power supplies, it makes sense to design the GND as a loop and connect the GND of all additional circuits or power supplies here. So there is always the guarantee that a common potential exists for all circuit parts and everything works satisfactorily.
Another note: a MEGA module may be max. 800mA current "pull". I recommend limiting the power consumption to 500mA. A continuous operation in the border area is likely to be harmful in the long run. A stepper requires about 200mA of quiescent current. Therefore, it should be operated from the outset with an external power supply. Here, too, applies to the external power supply: the load should not exceed 60% permanently. A pure recommendation on my part. Everyone can run their circuits at full load, but should also be aware of the consequences.