Hallo Sebastian,
Vielen lieben Dank für deine Antwort!

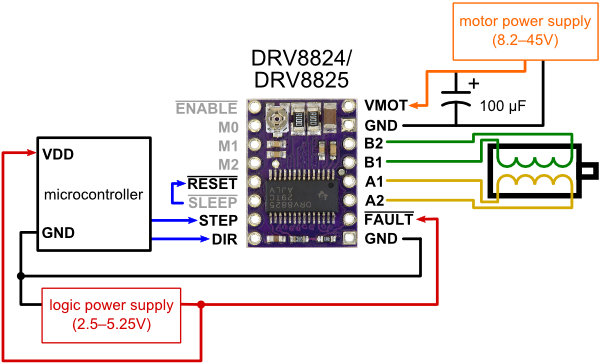
Mittlerweile hatte ich es direkt über einen eigenen Arduinosketch und LUA-Skript versucht, die mir ein Kollege geschrieben hat. Als Treiber habe ich diesen hier verwendet und auch so angeschlossen:
https://a.pololu-files.com/picture/0J4233.600.png?665d623ba84232de64511d8aa6644836
Allerdings gibt es da scheinbar aber noch Probleme mit dem LUA-Script, dass bei Down Trimmwerten den größten Up Trimmwert an den Arduino schickt und somit dann alles aus dem Ruder läuft. Momentan wissen wir nicht warum.

Ich habe alternativ zum ULN2003 einen L298N gefunden der laut einem Kumpel wohl so angeschlossen,
https://www.google.de/url?sa=t&rct=j&q=&esrc=s&source=web&cd=8&sqi=2&ved=0ahUKEwiIocKBnf_OAhVDrRoKHdIpCbUQFghCMAc&url=http%3A%2F%2Fforum.arduino.cc%2Findex.php%3Faction%3Ddlattach%3Btopic%3D366727.0%3Battach%3D147606&usg=AFQjCNGS3_NTuQXEaG9fbtooj9pLt0Rw5g&sig2=P_Lvzqz-bxAuBBPiscR3bg&bvm=bv.131783435,d.d2s dann mit Mobiflight funktionieren soll. Ausprobiert habe ich es bis jetzt noch nicht. Kann ich denn bei Mobiflight auch die Schrittgröße und Geschwindigkeit einstellen? Da ich ja einen echten Throttle habe, braucht es natürlich schon Power und ein Motorstall bei zu schnellen Anfahren ist da nicht ausgeschlossen.
Das Problem mit einem Endanschlag via Taster o.ä. ist, dass ich keine Möglichkeit dazu im echten Trimmwheelaufbau habe. Ich kann also nicht einfach am Ende einen kleinen Taster irgendwo anbringen, der das Ende dann triggert. Ein mechanischer Endanschlag befindet sich dort allerdings, allerdings ist der verschweisst, verbaut und dadurch nicht zu öffnen. Würde es denn nicht auch so gehen: Motor läuft bis zum mechanischen Endanschlag, Encoder merkt, dass es hier nicht mehr weiter geht und setzt dann den Wert für den Endanschlag... dadurch kann doch das Programm dann zurück rechnen wo die Nullposition ist und es läuft?!
Für mich ist aber eigentlich die Lösung mit dem automatischen Anfahren der 0 Postion bei Start von Mobiflight auch ok. Was ist aber, wenn Mobiflight geschlossen ist und am Wheel auf Up 2 zb. gedreht wird, woher weiß Mobiflight, dass dies geschehen ist und fährt automatisch auf die 0 Position?
Freu mich auf deine Antwort
Grüße
Florian


{kind=link}